



简介
<strong>LaserMix</strong>是一个为激光雷达语义分割设计的半监督学习(SSL)框架。它利用驾驶场景的强<strong>空间先验</strong>,通过<strong>激光束混合</strong>构建<strong>低变化区域</strong>,并鼓励分割模型在混合前后做出<strong>自信</strong>和<strong>一致</strong>的预测。
<br> <p align="center"> <img src="https://yellow-cdn.veclightyear.com/0a4dffa0/ea2a1ad0-f1fd-4ba9-b46b-abc02dc34902.png" align="center" width="50%"> <br> 图. 基于倾角φ的激光束分区示意图。 </p> <br>访问我们的<a href="https://ldkong.com/LaserMix" target='_blank'>项目页面</a>了解更多详情。:red_car:
更新
- [2024.05] - 我们改进的框架 LaserMix++ :rocket: 已在 arXiv 上发布。
- [2024.01] - 为 RoboDrive 挑战赛 定制的工具包已经发布。:hammer_and_wrench:
- [2023.12] - 我们正在 ICRA 2024 上举办 RoboDrive 挑战赛。:blue_car:
- [2023.12] - 推出 FRNet,��这是一个高效且有效的实时 LiDAR 分割模型,在
SemanticKITTI和nuScenes上取得了promising的半监督学习结果。代码和检查点可供下载。 - [2023.03] - 想测试你的 LiDAR 语义分割模型的鲁棒性吗?查看我们最新的工作 :robot: Robo3D,这是一个综合套件,能够在我们新建立的数据集
SemanticKITTI-C、nuScenes-C和WOD-C上评估 3D 分割器的分布外鲁棒性。 - [2023.03] - LaserMix 被选为 CVPR 2023 的 :sparkles: 亮点论文 :sparkles:(被接收论文的前 10%)。
- [2023.02] - LaserMix 被 CVPR 2023 接收!:tada:
- [2023.02] - LaserMix 已集成到 MMDetection3D 代码库中!查看
dev-1.x分支中的这个 PR 了解更多详情。:beers: - [2023.01] - 根据建议,我们将在半监督 LiDAR 语义分割基准中建立一个序列轨道,考虑 LiDAR 数据收集的本质。结果将逐步更新在 RESULT.md 中。
- [2022.12] - 我们支持更广泛的 LiDAR 分割骨干网络,包括 RangeNet++、SalsaNext、FIDNet、CENet、MinkowskiUNet、Cylinder3D 和 SPVCNN,支持全监督和半监督设置。检查点将很快提供!
- [2022.12] - 基于空间先验的 SSL 推导可在此处获得。快来看看!:memo:
- [2022.08] - 根据 Paper-with-Code,LaserMix 在 nuScenes、SemanticKITTI 和 ScribbleKITTI 的半监督语义分割排行榜上均获得第一名。:bar_chart:
- [2022.08] - 我们提供了一个 视频演示,展示了在 SemanticKITTI 验证集上的视觉比较。快来看看!
- [2022.07] - 我们的论文已在 arXiv 上发布,点击<a href="https://arxiv.org/abs/2207.00026" target='_blank'>这里</a>查看。代码将很快提供!
大纲
安装
请参考 INSTALL.md 了解安装详情。
数据准备
请参考 DATA_PREPARE.md 了解准备 <sup>1</sup>nuScenes、<sup>2</sup>SemanticKITTI 和 <sup>3</sup>ScribbleKITTI 数据集的详细信息。
入门指南
请参考 GET_STARTED.md 了解更多关于这个代码库的使用方法。
视频演示
| 演示 1 | 演示 2 | 演示 3 |
|---|---|---|
| <img width="100%" src="https://yellow-cdn.veclightyear.com/0a4dffa0/4004b01f-9653-4f7e-8fbf-3aea29e658f0.png"> | <img width="100%" src="https://yellow-cdn.veclightyear.com/0a4dffa0/f0993f8c-b772-4c5f-8fc0-58f35d3bc9b8.png"> | <img width="100%" src="https://yellow-cdn.veclightyear.com/0a4dffa0/82e56981-d537-4626-9784-d0075fc3090e.png"> |
| 链接 <sup>:arrow_heading_up:</sup> | 链接 <sup>:arrow_heading_up:</sup> | 链接 <sup>:arrow_heading_up:</sup> |
主要结果
框架概述
<p align="center"> <img src="https://yellow-cdn.veclightyear.com/0a4dffa0/67b2a591-d26e-4361-aa9c-3bbd5b260816.png" align="center" width="99.9%"> </p>范围视图
<table> <tr> <th rowspan="2">方法</th> <th colspan="4">nuScenes</th> <th colspan="4">SemanticKITTI</th> <th colspan="4">ScribbleKITTI</th> </tr> <tr> <td>1%</td> <td>10%</td> <td>20%</td> <td>50%</td> <td>1%</td> <td>10%</td> <td>20%</td> <td>50%</td> <td>1%</td> <td>10%</td> <td>20%</td> <td>50%</td> </tr> <tr> <td>仅监督</td> <td>38.3</td> <td>57.5</td> <td>62.7</td> <td>67.6</td> <td>36.2</td> <td>52.2</td> <td>55.9</td> <td>57.2</td> <td>33.1</td> <td>47.7</td> <td>49.9</td> <td>52.5</td> </tr> <tr> <td><strong>LaserMix</strong></td> <td>49.5</td><td>68.2</td><td>70.6</td><td>73.0</td> <td>43.4</td><td>58.8</td><td>59.4</td><td>61.4</td> <td>38.3</td><td>54.4</td><td>55.6</td><td>58.7</td> </tr> <tr> <td><i>提升</i> ↑</td> <td><sup>+</sup>11.2</td> <td><sup>+</sup>10.7</td> <td><sup>+</sup>7.9</td> <td><sup>+</sup>5.4</td> <td><sup>+</sup>7.2</td> <td><sup>+</sup>6.6</td> <td><sup>+</sup>3.5</td> <td><sup>+</sup>4.2</td> <td><sup>+</sup>5.2</td> <td><sup>+</sup>6.7</td> <td><sup>+</sup>5.7</td> <td><sup>+</sup>6.2</td> </tr> <tr> <td><strong>LaserMix++</strong></td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> </tr> <tr> <td><i>提升</i> ↑</td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> </tr> </table>体素
<table> <tr> <th rowspan="2">方法</th> <th colspan="4">nuScenes</th> <th colspan="4">SemanticKITTI</th> <th colspan="4">ScribbleKITTI</th> </tr> <tr> <td>1%</td> <td>10%</td> <td>20%</td> <td>50%</td> <td>1%</td> <td>10%</td> <td>20%</td> <td>50%</td> <td>1%</td> <td>10%</td> <td>20%</td> <td>50%</td> </tr> <tr> <td>仅监督</td> <td>50.9</td> <td>65.9</td> <td>66.6</td> <td>71.2</td> <td>45.4</td> <td>56.1</td> <td>57.8</td> <td>58.7</td> <td>39.2</td> <td>48.0</td> <td>52.1</td> <td>53.8</td> </tr> <tr> <td><strong>LaserMix</strong></td> <td>55.3</td> <td>69.9</td> <td>71.8</td> <td>73.2</td> <td>50.6</td> <td>60.0</td> <td>61.9</td> <td>62.3</td> <td>44.2</td> <td>53.7</td> <td>55.1</td> <td>56.8</td> </tr> <tr> <td><i>提升</i> ↑</td> <td><sup>+</sup><small>4.4</small></td> <td><sup>+</sup><small>4.0</small></td> <td><sup>+</sup><small>5.2</small></td> <td><sup>+</sup><small>2.0</small></td> <td><sup>+</sup><small>5.2</small></td> <td><sup>+</sup><small>3.9</small></td> <td><sup>+</sup><small>4.1</small></td> <td><sup>+</sup><small>3.6</small></td> <td><sup>+</sup><small>5.0</small></td> <td><sup>+</sup><small>5.7</small></td> <td><sup>+</sup><small>3.0</small></td> <td><sup>+</sup><small>3.0</small></td> </tr> <tr> <td><strong>LaserMix++</strong></td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> </tr> <tr> <td><i>提升</i> ↑</td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> <td> </td> </tr> </table>消融研究
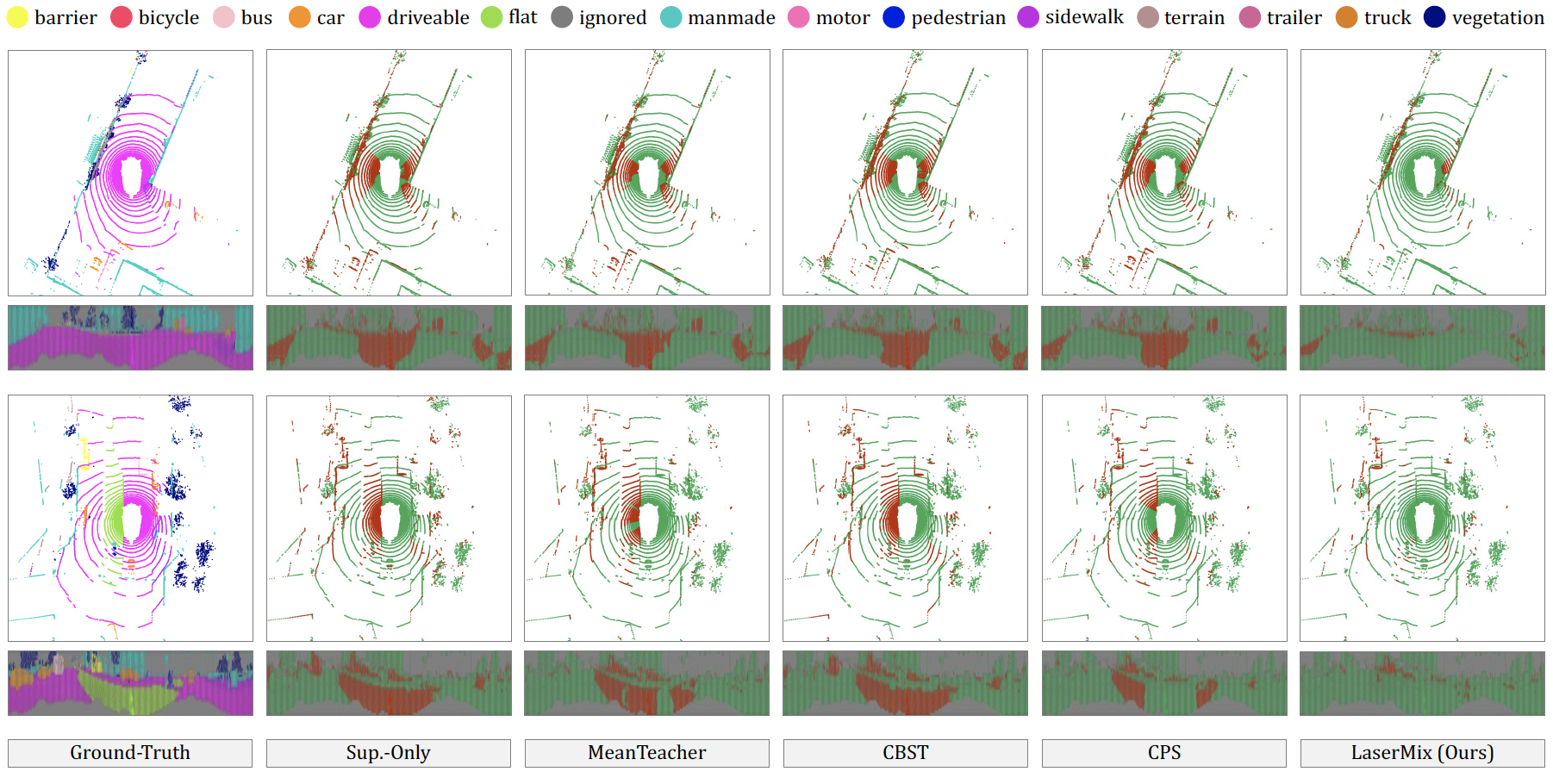
<p align="center"> <img src="https://yellow-cdn.veclightyear.com/0a4dffa0/e2a5a634-a376-4b02-a0ce-5c33e72994d6.png" align="center" width="99.9%"> </p>定性示例
检查点和更多结果
有关更多实验结果和预训练权重,请参阅 RESULT.md。
待办事项
- 初始发布。:rocket:
- 添加许可证。详情请参阅此处。
- 添加视频演示 :movie_camera:
- 添加安装详情。
- 添加数据准备详情。
- 添加评估详情。
- 添加训练详情。
引用
如果您觉得这项工作有帮助,请考虑引用我们的论文:
@inproceedings{kong2023lasermix, title = {LaserMix for Semi-Supervised LiDAR Semantic Segmentation}, author = {Kong, Lingdong and Ren, Jiawei and Pan, Liang and Liu, Ziwei}, booktitle = {IEEE/CVF Conference on Computer Vision and Pattern Recognition}, pages = {21705--21715}, year = {2023}, }
许可证
<a rel="license" href="http://creativecommons.org/licenses/by-nc-sa/4.0/"><img alt="知识共享许可协议" style="border-width:0" src="https://yellow-cdn.veclightyear.com/0a4dffa0/4a3ffd7f-7ce6-4196-b1c2-58f6fcd14562.png" /></a> <br /> 本作品采用<a rel="license" href="http://creativecommons.org/licenses/by-nc-sa/4.0/">知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议</a>进行许可。
致谢
本工作基于 MMDetection3D 代码库开发。
<img src="https://yellow-cdn.veclightyear.com/0a4dffa0/978e7740-fbb5-4aea-a6f1-e2528764537e.png" width="30%"/><br> MMDetection3D是一个基于PyTorch的开源工具箱,旨在成为下一代通用3D感知平台。它是由MMLab开发的OpenMMLab项目的一部分。
在本工作过程中,我们感谢使用了以下公共资源:<sup>1</sup>nuScenes、<sup>2</sup>nuScenes-devkit、<sup>3</sup>SemanticKITTI、<sup>4</sup>SemanticKITTI-API、<sup>5</sup>ScribbleKITTI、<sup>6</sup>FIDNet、<sup>7</sup>CENet、<sup>8</sup>SPVNAS、<sup>9</sup>Cylinder3D、<sup>10</sup>TorchSemiSeg、<sup>11</sup>MixUp、<sup>12</sup>CutMix、<sup>13</sup>CutMix-Seg、<sup>14</sup>CBST、<sup>15</sup>MeanTeacher和<sup>16</sup>Cityscapes。
我们要特别感谢<a href="https://hongfz16.github.io/" target='_blank'>洪方舟</a>富有洞察力的讨论和反馈。❤️
编辑推荐精选


扣子-AI办公
职场AI,就用扣子
AI办公助手,复杂任务高效处理。办公效率低?扣子空间AI助手支持播客生成、PPT制作、网页开发及报告写作,覆盖科研、商业、舆情等领域的专家Agent 7x24小时响应,生活工作无缝切换,提升50%效率!


堆友
多风格AI绘画神器
堆友平台由阿里巴巴设计团队创建,作为一款AI驱动的设计工具,专为设计师提供一站式增长服务。功能覆盖海量3D素材、AI绘画、实时渲染以及专业抠图,显著提升设计品质和效率。平台不仅提供工具,还是一个促进创意交流和个人发展的空间,界面友好,适合所有级别的设计师和创意工作者。


码上飞
零代码AI应用开发平台
零代码AI应用开发平台,用户只需一句话简单描述需求,AI能自动生成小程序、APP或H5网页应用,无需编写代码。


Vora
免费创建高清无水印Sora视频
Vora是一个免费创建高清无水印Sora视频的AI工具


Refly.AI
最适合小白的AI自动化工作流平台
无需编码,轻松生成可复用、可变现�的AI自动化工作流


酷表ChatExcel
大模型驱动的Excel数据处理工具
基于大模型交互的表格处理系统,允许用户通过对话方式完成数据整理和可视化分析。系统采用机器学习算法解析用户指令,自动执行排序、公式计算和数据透视等操作,支持多种文件格式导入导出。数据处理响应速度保持在0.8秒以内,支持超过100万行数据的即时分析。


TRAE编程
AI辅助编程,代码自动修复
Trae是一种自适应的集成开发环境(IDE),通过自动化和多元协作改变开发流程。利用Trae,团队能够更快速、精确地编写和部署代码,从而提高编程效率和项目交付速度。Trae具备上下文感知和代码自动完成功能,是提升开发效率的理想工具。


AIWritePaper论文写作
AI论文写作指导平台
AIWritePaper论文写作是一站式AI论文写作辅助工具,简化了选题、文献检索至论文撰写的整个过程。通过简单设定,平台可快速生成高质量论文大纲和全文,配合图表、参考文献等一应俱全,同时提供开题报告和答辩PPT等增值服务,保障数据安全,有效提升写作效率和论文质量。


博思AIPPT
AI一键生成PPT,就用博思AIPPT!
博思AIPPT,新一代的AI生成PPT平台,支持智能生成PPT�、AI美化PPT、文本&链接生成PPT、导入Word/PDF/Markdown文档生成PPT等,内置海量精美PPT模板,涵盖商务、教育、科技等不同风格,同时针对每个页面提供多种版式,一键自适应切换,完美适配各种办公场景。


潮际好麦
AI赋能电商视觉革命,一站式智能商拍平台
潮际好麦深耕服装行业,是国内AI试衣效果最好的软件。使用先进AIGC能力为电商卖家批量提供优质的、低成本的商拍图。合作品牌有Shein、Lazada、安踏、百丽等65个国内外头部品牌,以及国内10万+淘宝、天猫、京东等主流平台的品牌商家,为卖家节省将近85%的出图成本,提升约3倍出图效率,让品牌能够快速上架。
推荐工具精选




AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号