panda-gym: 开源的目标条件机器人学习环境
 Ray
Raypanda-gym: 开源的目标条件机器人学习环境
panda-gym是一个基于PyBullet物理引擎和Gymnasium框架开发的开源机器人强化学习环境集。该项目由Quentin Gallouédec等人开发,旨在为机器人学习研究提供一个灵活、易用的仿真平台。panda-gym的核心是模拟Franka Emika公司的Panda机器人,并提供了一系列经典的机器人操作任务。
项目特点
panda-gym具有以下几个主要特点:
-
基于开源物理引擎PyBullet,保证了仿真的准确性和可扩展性。
-
兼容OpenAI Gym接口,可以无缝对接各种强化学习算法。
-
提供多种经典机器人操作任务,如抓取、推动、翻转等。
-
支持目标条件学习,适用于多目标强化学习研究。
-
代码结构清晰,易于二次开发和自定义新任务。
环境介绍
panda-gym目前包含以下6种经典任务环境:
- Reach: 控制机械臂末端执行器到达目标位置
- Push: 推动物体到指定目标位置
- Slide: 滑动物体到指定目标位置
- Pick and Place: 抓取物体并放置到目标位置
- Stack: 将两个物体堆叠在目标位置
- Flip: 将物体翻转到目标朝向
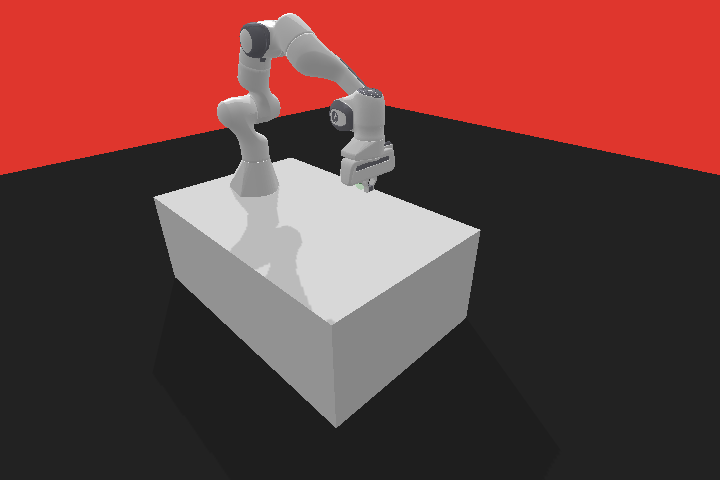
图1: PandaReach-v3 任务示例
每个任务都提供了两种控制模式:
- 末端执行器位移控制:直接控制末端执行器的位移
- 关节角度控制:控制每个关节的角度
同时还提供了两种奖励函数:
- 稀疏奖励:只有完成任务才有奖励
- 密集奖励:根据完成程度给出连续的奖励值
这些不同的设置为研究者提供了丰富的实验选择。
安装与使用
panda-gym可以通过pip轻松安装:
pip install panda-gym
使用时只需要几行代码即可创建环境并进行交互:
import gymnasium as gym import panda_gym env = gym.make('PandaReach-v3', render_mode="human") observation, info = env.reset() for _ in range(1000): action = env.action_space.sample() # 随机动作 observation, reward, terminated, truncated, info = env.step(action) if terminated or truncated: observation, info = env.reset() env.close()
自定义环境
panda-gym的一大优势是其良好的可扩展性。研究者可以基于现有代码轻松创建自定义的机器人或任务:
- 自定义机器人:继承Robot基类,实现机器人的运动学和动力学。
- 自定义任务:继承Task基类,定义任务的目标、奖励函数等。
- 组合新环境:将自定义的机器人和任务组合,注册为新的Gym环境。
这种模块化的设计使得panda-gym非常适合进行各种机器人学习的研究工作。
基线结果
panda-gym的开发者还提供了一些基于state-of-the-art强化学习算法的基线结果,可以在rl-baselines3-zoo项目中找到。这些预训练模型也已经上传到了Hugging Face Hub,方便研究者直接使用或进行对比实验。
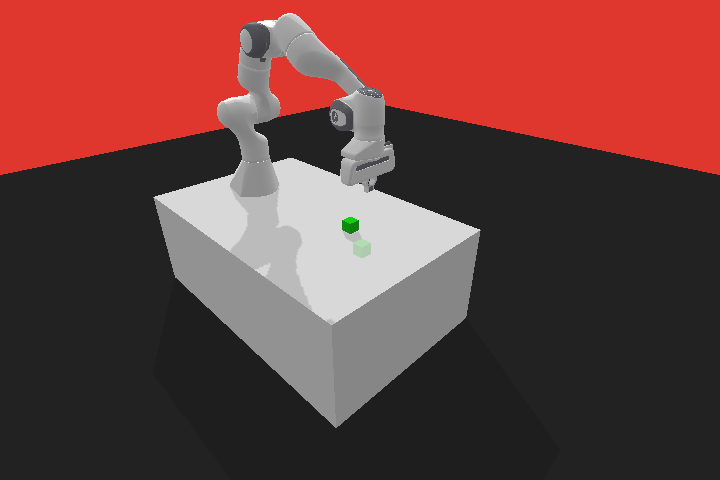
图2: PandaPickAndPlace-v3 任务示例
开源贡献
作为一个开源项目,panda-gym欢迎来自社区的贡献。目前该项目在GitHub上已获得超过500颗星,有100多个fork。主要贡献者包括Quentin Gallouédec、Nicolas Cazin等人。
如果你对这个项目感兴趣,可以通过以下方式参与:
- 在GitHub上提交Issue或Pull Request
- 为文档做出贡献
- 开发新的任务或机器人模型
- 分享你使用panda-gym的研究成果
总结
panda-gym为机器人强化学习研究提供了一个功能丰富、易于使用的开源仿真环境。它不仅包含了多种经典任务,还具有良好的可扩展性,能够满足各种研究需求。无论你是刚接触机器人学习的新手,还是寻找可靠仿真平台的资深研究者,panda-gym都是一个值得尝试的选择。
随着机器人技术和人工智能的快速发展,像panda-gym这样的开源项目将在推动学术研究和工业应用方面发挥重要作用。我们期待看到更多基于panda-gym的创新成果,共同推动机器人学习领域的进步。
参考链接
- panda-gym GitHub仓库: https://github.com/qgallouedec/panda-gym
- panda-gym文档: https://panda-gym.readthedocs.io/
- 相关论文: arXiv:2106.13687
通过这些资源,读者可以进一步深入了解panda-gym项目,并开始自己的机器人学习之旅。让我们一起为推动机器人技术的发展贡献力量!
编辑推荐精选


Pixmax
一站式AI短剧创作平台
Pixmax专注打造下一代“ AI 视觉创作引擎”,整合行业顶尖 AI 大模型、工工业级精准控制及企业级协同管理功能,是全方位的 AI 内容创作平台。

豆包
字节跳动旗下 AI 智能助手
字节跳动旗下 AI 智能助手


GPT Plus|Pro充值
GPT充值
支持 ChatGPT Plus / Pro 充值服务,支付便捷,自动发货,售后可查。


GPT Image 2中文站
AI 图片生成平台
GPT Image 2 是面向用户的 AI 图片生成平台,支持文生图、图生图及�多模型创意工作流。


Vecbase
你的AI Agent团队
Vecbase 是专为 AI 团队打造的智能工作空间,将数据管理、模型协作与知识沉淀整合于一处。算法、产品与业务在同一平台无缝协同,让从数据到 AI 应用的落地更快一步。


音述AI
全球首个AI音乐社区
音述AI是全球首个AI音乐社区,致力让每个人都能用音乐表达自我。音述AI提供零门槛AI创作工具,独创GETI法则帮助用户精准定义音乐风格,AI润色功能支持自动优化作品质感。音述AI支持交流讨论、二次创作与价值变现。针对中文用户的语言习惯与文化背景进行专门优化,支持国风融合、C-pop等本土音乐标签,让技术更好地承载人文表达。


QoderWork
阿里Qoder团队推出的桌面端AI智能体
QoderWork 是阿里推出的本地优先桌面 AI 智能体,适配 macOS14+/Windows10+,以自然语言交互实现文件管理、数据分析、AI 视觉生成、浏览器自动化等办公任务,自主拆解执行复杂工作流,数据本地运行零上传,技能市场可无限扩展,是高效的 Agentic 生产力办公助手。


lynote.ai
一站式搞定所有学习需求
不再被海量信息淹没,开始真正理解知识。Lynote 可摘要 YouTube 视频、PDF、文章等内容。即时创建笔记,检测 AI 内容并下载资料,将您的学习效率提升 10 倍。


AniShort
为AI短剧协作而生
专为AI短剧协作而生的AniShort正式发布,深度重构AI短剧全流程生产模式,整合创意策划、制作执行、实时协作、在线审片、资产复用等全链路功能,独创无限画布、双轨并行工业化工作流与Ani智能体助手,集成多款主流AI大模型,破解素材零散、版本混乱、沟通低效等行业痛点,助力3人团队效率提升800%,打造标准化、可追溯的AI短剧量产体系,是AI短剧团队协同创作、提升制作效率的核心工具。


seedancetwo2.0
能听懂你表达的视频模型
Seedance two是基于seedance2.0的中国大模型,支持图像、视频、音频、文本四种模态输入,表达方式更丰富,生成也更可控。
推荐工具精选






AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号