CARLA-Roach: 端到端城市自动驾驶的强化学习教练模仿
 Ray
RayCARLA-Roach: 模仿强化学习教练的端到端城市自动驾驶系统
CARLA-Roach是一个基于CARLA模拟器的端到端城市自动驾驶系统,由来自ETH Zurich的研究人员开发。该项目的核心思想是通过模仿强化学习(RL)教练来实现更好的自动驾驶性能。这种方法结合了强化学习的探索能力和模仿学习的稳定性,为解决复杂的城市自动驾驶任务提供了一个新的思路。
项目背景与目标
随着自动驾驶技术的快速发展,如何在复杂多变的城市环境中实现安全、高效的端到端自动驾驶成为了一个重要的研究课题。传统的方法往往依赖于精确的环境感知和复杂的决策规则,而近年来基于深度学习的端到端方法展现出了巨大的潜力。
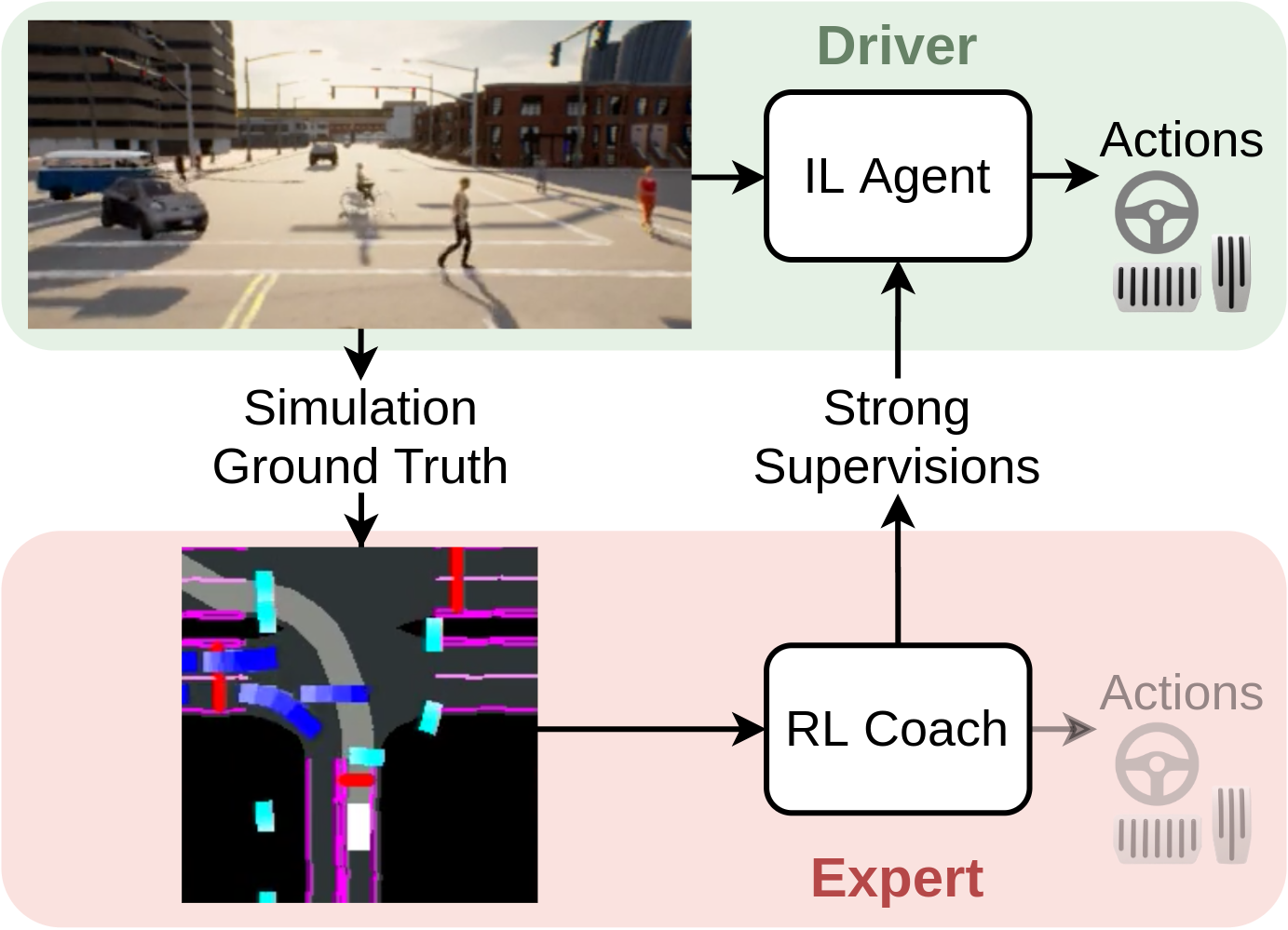
CARLA-Roach项目的目标是开发一种新的端到端自动驾驶方法,通过模仿强化学习教练来学习驾驶策略。具体来说,该方法首先训练一个强化学习智能体(称为Roach)作为教练,然后使用模仿学习方法让一个端到端的驾驶智能体从Roach学习驾驶技能。这种方法的优势在于:
- 利用强化学习的探索能力来学习复杂的驾驶策略
- 通过模仿学习提高训练的稳定性和效率
- 实现端到端的驾驶控制,无需复杂的环境感知和规则设计
主要特点与创新
CARLA-Roach项目具有以下主要特点和创新:
-
端到端学习: 系统直接从传感器输入学习到控制输出,无需中间环节。
-
强化学习教练: 使用PPO算法训练的强化学习智能体作为驾驶教练。
-
模仿学习: 采用DAGGER(Dataset Aggregation)算法进行模仿学习,逐步提升模型性能。
-
多任务学习: 同时学习转向、加速、刹车等多个驾驶动作。
-
基准测试: 提供了NoCrash和CARLA Leaderboard等多个基准测试环境。
-
开源代码: 完整开源了数据收集、模型训练和评估的全部代码。
系统架构
CARLA-Roach系统的整体架构包括以下几个主要模块:
-
CARLA模拟器: 提供逼真的城市驾驶环境模拟。
-
强化学习模块: 使用PPO算法训练Roach教练智能体。
-
模仿学习模块: 实现DAGGER算法,从Roach学习驾驶策略。
-
端到端驾驶模型: 基于CILRS(Conditional Imitation Learning with Resnet and Speed)架构。
-
数据收集模块: 支持离线和在线数据收集。
-
基准测试模块: 实现多个标准化的评估环境。
实验结果
研究人员在多个基准测试中评估了CARLA-Roach的性能,包括NoCrash和CARLA Leaderboard。实验结果表明:
-
Roach教练在多个指标上优于手工设计的CARLA专家系统。
-
通过模仿学习,端到端模型可以达到接近Roach的性能。
-
该方法在泛化性和鲁棒性方面表现出色,能够适应不同的天气条件和新的城镇环境。
使用指南
CARLA-Roach项目提供了详细的使用说明,主要包括以下几个方面:
-
安装: 项目基于AWS EC2进行开发,但也可以在本地或集群上运行。详细的安装步骤可以参考INSTALL.md文件。
-
数据收集:
- 使用
run/data_collect_bc.sh脚本收集离线数据集 - 使用
run/data_collect_dagger.sh脚本收集在线DAGGER数据集
- 使用
-
模型训练:
- 使用
run/train_rl.sh脚本训练RL专家 - 使用
run/train_il.sh脚本训练IL智能体
- 使用
-
基准测试: 使用
run/benchmark.sh脚本对训练好的模型进行评估 -
预训练模型: 项目提供了多个预训练模型,可以直接用于评估或进一步训练
未来展望
尽管CARLA-Roach在多个基准测试中取得了优秀的结果,但研究人员认为该方法还有进一步改进的空间:
-
提高模型的可解释性: 当前的端到端模型仍然是一个"黑盒",如何提高其可解释性是一个重要的研究方向。
-
处理极端情况: 如何让模型更好地处理罕见的极端情况仍然是一个挑战。
-
迁移到真实世界: 将模拟器中训练的模型迁移到真实世界是自动驾驶研究的一个重要目标。
-
多智能体协作: 探索多个自动驾驶智能体之间的协作策略。
-
结合先验知识: 如何更好地将人类的先验知识融入端到端学习过程中。
总结
CARLA-Roach项目为端到端自动驾驶研究提供了一个创新的方法和完整的开源实现。通过结合强化学习和模仿学习的优势,该方法在复杂的城市驾驶环境中展现出了优秀的性能。这个项目不仅推动了自动驾驶技术的发展,也为其他复杂控制任务的端到端学习提供了有价值的参考。
对于有兴趣深入了解或使用CARLA-Roach的研究人员和开发者,可以访问项目的GitHub仓库获取完整的代码和文档。同时,研究人员也欢迎社区成员对项目进行贡献,��共同推动自动驾驶技术的发展。
编辑推荐精选


音述AI
全球首个AI音乐社区
音述AI是全球首个AI音乐社区,致力让每个人都能用音乐表达自我。音述AI提供零门槛AI创作工具,独创GETI法则帮助用户精准定义音乐风格,AI润色功能支持自动优化作品质感。音述AI支持交流讨论、二次创作与价值变现。针对中文用户的语言习惯与文化背景进行专门优化,支持国风融合、C-pop等本土音乐标签,让技术更好地承载人文表达。


QoderWork
阿里Qoder团队推出的桌面端AI智能体
QoderWork 是阿里推出的本地优先桌面 AI 智能体,适配 macOS14+/Windows10+,以自然语言交互实现文件管理、数据分析、AI 视觉生成、浏览器自动化等办公任务,自主拆解执行复杂工作流,数据本地运行零上传,技能市场可无限扩展,是高效的 Agentic 生产力办公助手。


lynote.ai
一站式搞定所有学习需求
不再被海量信息淹没,开始真正理解知识。Lynote 可摘要 YouTube 视频、PDF、文章等内容。即时创建笔记,检测 AI 内容并下载资料,将您的学习效率提升 10 倍。


AniShort
为AI短剧协作而生
专为AI短剧协作而生的AniShort正式发布,深度重构AI短剧全流程生产模式,整合创意策划、制作执行、实时协作、在线审片、资产复用等全链路功能,独创无限画布、双轨并行工业化工作流与Ani智能体助手,集成多款主流AI大模型,破解素材零散、版本混乱、沟通低效等行业痛点,助力3人团队效率提升800%,打造标准化、可追溯的AI短剧量产体系,是AI短剧团队协同创作、提升制作效率的核心工具。


seedancetwo2.0
能听懂你表达的视频模型
Seedance two是基于seedance2.0的中国大模型,支持图像、视频、音频、文本四种模态输入,表达方式更丰富,生成也更可控。


nano-banana纳米香蕉中文站
国内直接访问,限时3折
输入简单文字,生成想要的图片,纳米香蕉中文站基于 Google 模型的 AI 图片生成网站,支持文字生图、图生图。官网价格限时3折活动


扣子-AI办公
职场AI,就用扣子
AI办公助手,复杂任务高效处理。办公效率低?扣子空间AI助手支持播客生成、PPT制作、网页开发及报告写作,覆盖科研、商业、舆情等领域的专家Agent 7x24小时响应,生活工作无缝切换,提升50%效率!


堆友
多风格AI绘画神器
堆友平台由阿里巴巴设计团队创建,作为一款AI驱动的设计工具,专为设计师提供一站式增长服务。功能覆盖海量3D素材、AI绘画、实时渲染以及专业抠图,显著提升设计品质和效率。平台不仅提供工具,还是一个促进创意交流和个人发展的空间,界面友好,适合所有级别的设计师和创意工作者。


码上飞
零代码AI应用开发平台
零代码AI应用开发平台,用户只需一句话简单描述需求,AI能自动生成小程序、APP或H5网页应用,无需编写代码。


Vora
免费创建高清无水印Sora视频
Vora是一个免费创建高清无水印Sora视频的AI工具
推荐工具精选





AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号