
StanfordQuadruped
四足机器人项目进入新阶段 全新版本即将问世
StanfordQuadruped项目宣布停止支持Pupper v1,转而开发Pupper v3。新版本将采用400W无刷电机、树莓派5和深度摄像头,并集成强化学习运动策略。该项目此前开发的四足机器人能够奔跑、行走和跳跃,引起广泛关注。尽管停止对旧版支持,项目团队表示Pupper v3将继续保持开源,并计划在未来数月内发布详细构建指南。新版本预计材料成本约1000美元,为爱好者和开发者提供了可负担的高性能四足机器人平台。



斯坦福四足机器人
项目终止通知
感谢过去5年来大家对这个项目的关注和支持!
我们正在努力开发新版本Pupper v3,因此决定停止对本项目(Pupper v1)的支持。感谢您的理解!Pupper v3将完全开源,其制作说明将在未来几个月内发布。
Pupper v3主要规格
- 强劲的400W GIM4305无刷电机
- 树莓派5
- 开箱即用的强化学习运动策略
- Luxonis SR深度相机
- 用于调试和面部表情的LCD屏幕
- 物料清单约1000美元
概述
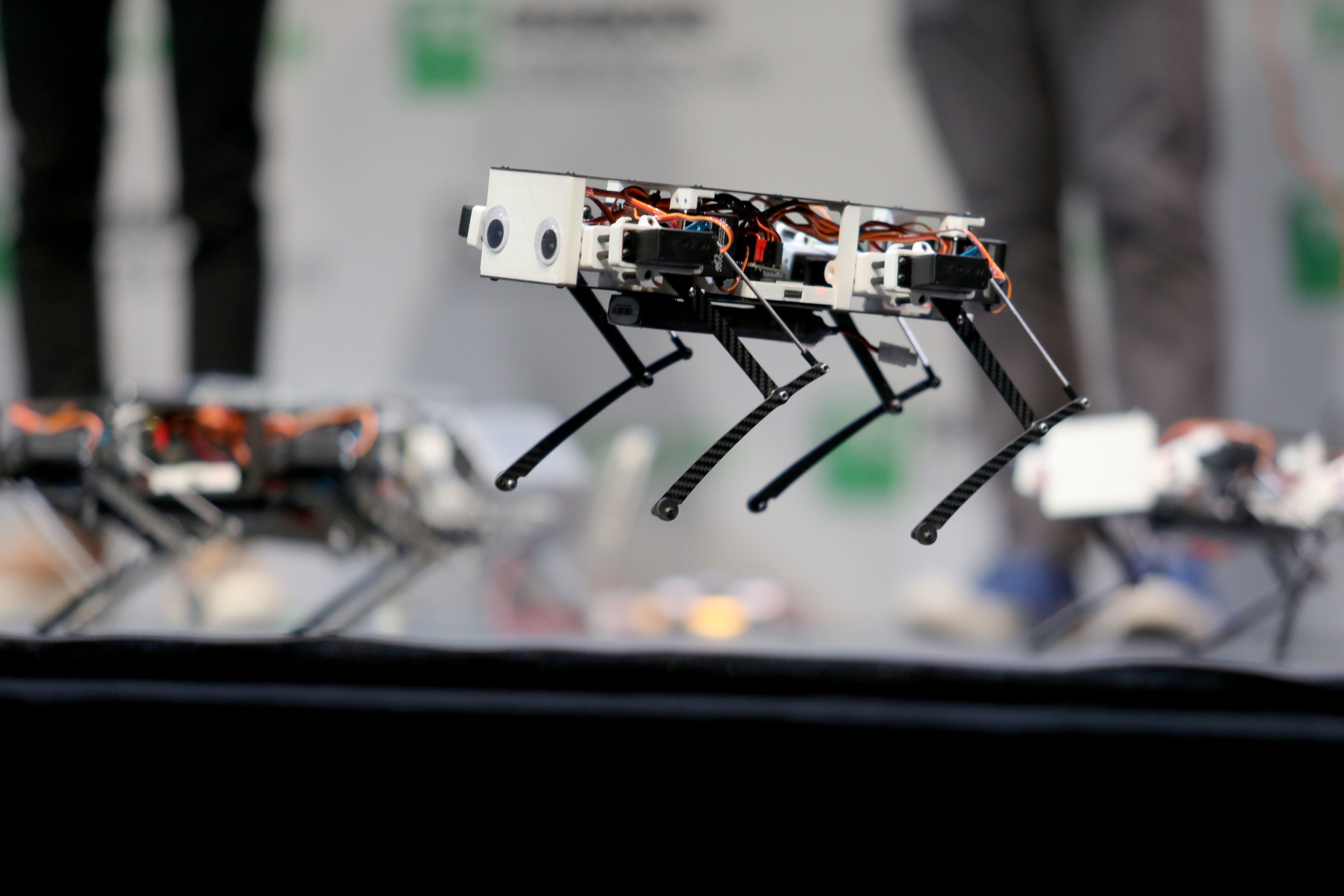
本仓库包含斯坦福Pupper和斯坦福Woofer的代码,这两款基于树莓派的四足机器人可以小跑、行走和跳跃。
Pupper运行视频:https://youtu.be/NIjodHA78UE
项目页面:https://stanfordstudentrobotics.org/pupper
文档和制作指南:https://pupper.readthedocs.io/en/latest/
工作原理
 主程序是本目录下的
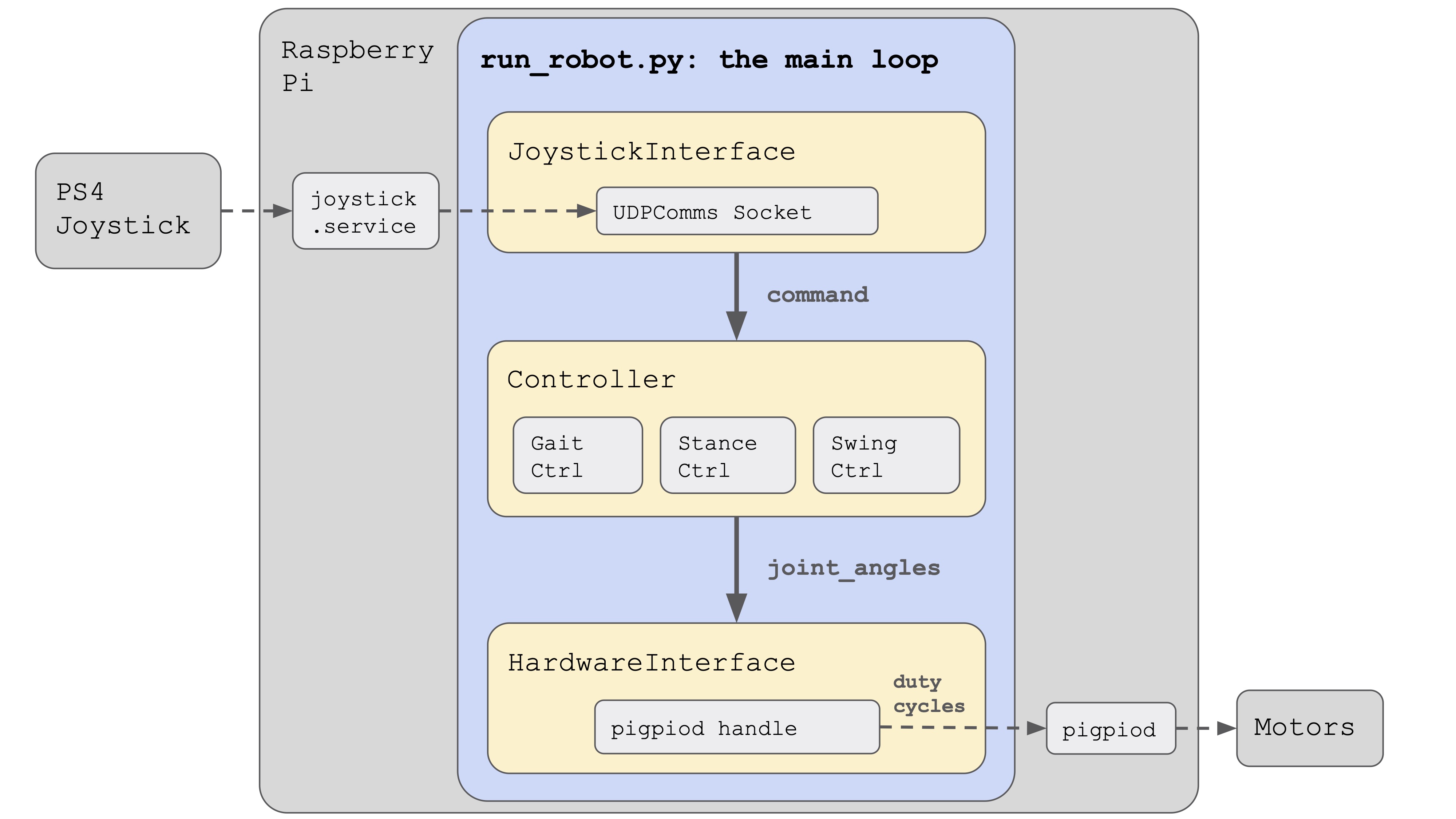
主程序是本目录下的run_robot.py。机器人代码以循环方式运行,由操纵杆接口、控制器和硬件接口协调控制其行为。
操纵杆接口负责从UDP套接字读取操纵杆输入,并将其转换为通用的机器人command类型。另一个程序joystick.py发布这些UDP消息,负责通过蓝牙读取PS4控制器的输入。控制器完成大部分工作,在不同状态(小跑、行走、休息等)之间切换并生成舵机位置目标。下图详细展示了控制器模型。代码的第三个组件是硬件接口,它将控制器的位置目标转换为PWM占空比,然后传递给pigpiod的Python绑定,后者在软件中生成PWM信号并将这些信号发送到连接在树莓派上的电机。
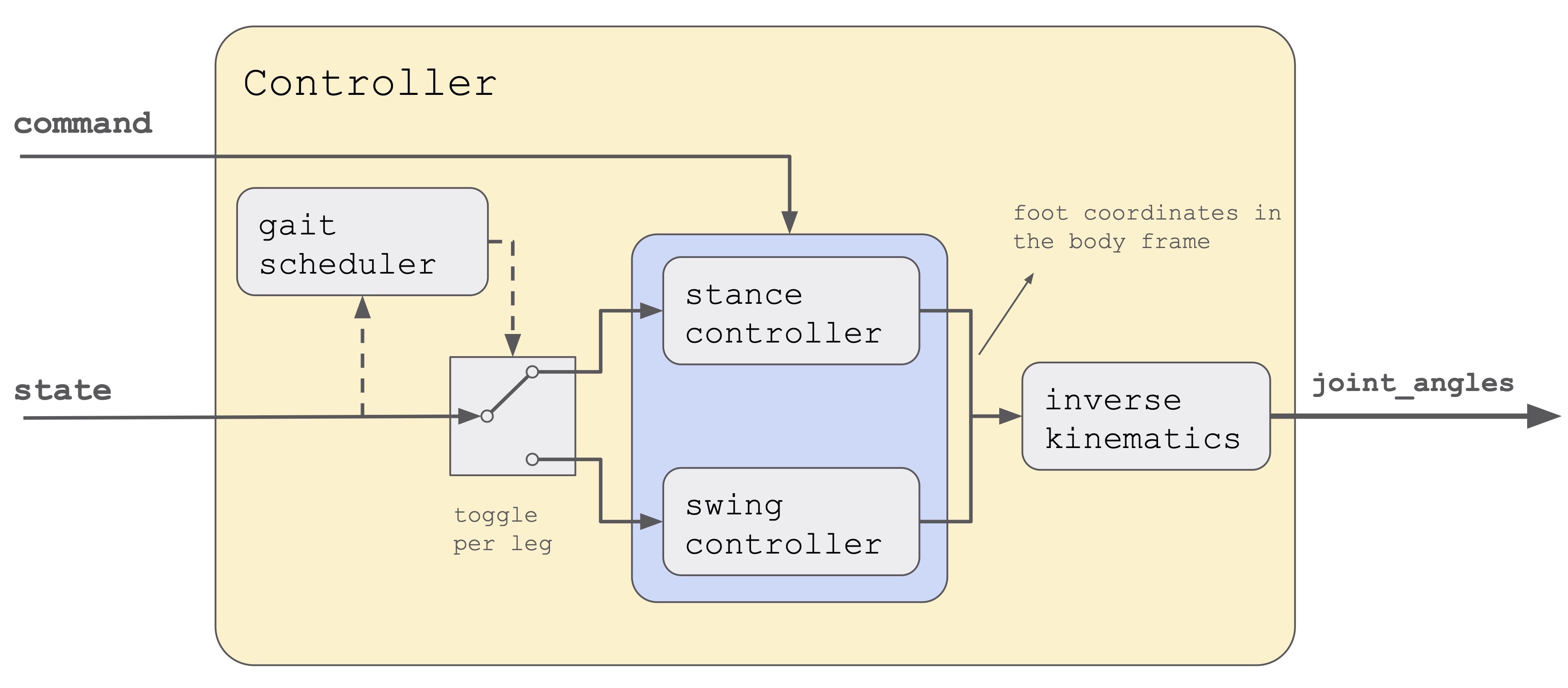 该图展示了机器人控制器的细节。其中包含四个主要组件:步态调度器(也称步态控制器)、支撑控制器、摆动控制器和逆运动学模型。
该图展示了机器人控制器的细节。其中包含四个主要组件:步态调度器(也称步态控制器)、支撑控制器、摆动控制器和逆运动学模型。
步态调度器负责规划在任何给定时间哪些足部应该在地面上(支撑),哪些应该向前移动到下一步(摆动)。例如,在小跑时,对角线对的腿同步移动,在支撑和摆动之间交替。如图所示,步态调度器可以被视为每条腿的指挥,随时间推移在支撑和摆动之间切换。
支撑控制器控制地面上的足部,实际上相当简单。它查看期望的机器人速度,然后为这些支撑足生成一个相对于身体的目标速度,方向与期望速度相反。它还包括转向,在这种情况下,它会以与期望身体旋转相反的方向旋转足部。
摆动控制器接管刚刚完成支撑阶段的足部,并将它们带到下一个着地位置。着地位置的选择使得足部在摆动阶段向前移动的距离与在支撑阶段向后移动的距离相同。例如,如果在支撑阶段足部以-0.4m/s的速度向后移动(以实现+0.4m/s的身体速度),且支撑阶段持续0.5秒,那么我们知道足部将向后移动-0.20m。摆动控制器随后将足部向前移动0.20m,使足部回到起始位置。你可以想象,如果摆动控制器只将腿向前移动0.15m,那么每一步足部都会越来越落后于身体-0.05m。
支撑和摆动控制器都会为足部生成相对于身体质心的笛卡尔坐标目标位置。在支撑和摆动规划中使用笛卡尔坐标很方便,但现在我们需要将它们转换为电机角度。这是通过使用逆运动学模型来完成的,该模型在笛卡尔身体坐标和电机角度之间进行映射。这些电机角度,也称为关节角度,然后被填入state变量并由模型返回。
如何制作Pupper
主要文档:https://pupper.readthedocs.io/en/latest/
你可以在这个网站上找到物料清单、预制套件购买选项、组装说明、软件安装等信息。
帮助
- 欢迎提出问题 (https://github.com/stanfordroboticsclub/StanfordQuadruped/issues/new/choose) 或发邮件至 nathankau [at] stanford [dot] edu
- 我们还建立了一个Google群组:https://groups.google.com/forum/#!forum/stanford-quadrupeds
编辑推荐精选


GPT Plus|Pro充值
GPT充值
支持 ChatGPT Plus / Pro 充值服务,支付便捷,自动发货,售后可查。


GPT Image 2中文站
AI 图片生成平台
GPT Image 2 是面向用户的 AI 图片生成平台,支持文生图、图生图及多模型创意工作流。


Vecbase
你的AI Agent团队
Vecbase 是专为 AI 团队打造的智能工作空间,将数据管理、模型协作与知识沉淀整合于一处。算法、产品与业务在同一平台无缝协同,让从数据到 AI 应用的落地更快一步。


音述AI
全球首个AI音乐社区
音述AI是全球首个AI音乐社区,致力让每个人都能用音乐表达自我。音述AI提供零门槛AI创作工具,独创GETI法则帮助用户精准定义音乐风格,AI润色功能支持自动优化作品质感。音述AI支持交流讨论、二次创作与价值变现。针对中文用户的语言习惯与文化背景进行专门优化,支持国风融合、C-pop等本土音乐标签,让技术更好地承载人文表达。


QoderWork
阿里Qoder团队推出的桌面端AI智能体
QoderWork 是阿里推出的本地优先桌面 AI 智能体,适配 macOS14+/Windows10+,以自然语言交互实现文件管理、数据分析、AI 视觉生成、浏览器自动化等办公任务,自主拆解执行复杂工作流,数据本地运行零上传,技能市场可无限扩展,是高效的 Agentic 生产力办公助手。


lynote.ai
一站式搞定所有学习需求
不再被海量信息淹没,开始真正理解知识。Lynote 可摘要 YouTube 视频、PDF、文章等内容。即时创建笔记,检�测 AI 内容并下载资料,将您的学习效率提升 10 倍。


AniShort
为AI短剧协作而生
专为AI短剧协作而生的AniShort正式发布,深度重构AI短剧全流程生产模式,整合创意策划、制作执行、实时协作、在线审片、资产复用等全链路功能,独创无限画布、双轨并行工业化工作流与Ani智能体助手,集成多款主流AI大模型,破解素材零散、版本混乱、沟通低效等行业痛点,助力3人团队效率提升800%,打造标准化、可追溯的AI短剧量产体系,是AI短剧团队协同创作、提升制作效率的核心工具。


seedancetwo2.0
能听懂你表达的视频模型
Seedance two是基于seedance2.0的中国大模型,支持图像、视频、音频、文本四种模态输入,表达方式更丰富,生成也更可控。


nano-banana纳米香蕉中文站
国内直接访问,限时3折
输入简单文字,生成想要的图片,纳米香蕉中文站基于 Google 模型的 AI 图片生成网站,支持文字生图、图生图。官网价格限时3折活动


扣子-AI办公
职场AI,就用扣子
AI办公助手,复杂任务高效处理。办公效率低?扣子空间AI助手支持播客生成、PPT制作、网页开发及报告写作,覆盖科研、商业、舆情等领域的专家Agent 7x24小时响应,生活工作无缝切换,提升50%效率!
推荐工具精选





AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号