
drone-flight-controller
Arduino四轴飞行器PID控制系统
这是一个开源的Arduino四轴飞行器控制系统项目,基于Arduino Uno和MPU6050传感器。通过250Hz刷新率的数字PID控制和Ziegler-Nichols方法优化飞行控制算法。项目包括硬件连接说明、遥控配置、PID调优指南和安全机制,为无人机爱好者和开发者提供全面的学习资源。采用X型四轴结构,实现稳定飞行。项目详细说明了硬件连接、遥控配置和PID调优方法,并提供了安全机制和调试指南,适合无人机爱好者和开发者参考学习。


四轴无人机 PID 实现



1. 简介
这个 Arduino 草图提供了一个基于 Arduino Uno 板和 MPU6050 传感器的 X 型四轴飞行器的飞行控制器。
基本上,这个自动化例程是一个数字 PID 的实现,刷新率为 250Hz。 用于计算 PID 系数的方法是 Ziegler-Nichols 方法。 四轴飞行器的框架基于 F450。
您可以使用 这个 来校准您的电机驱动器。
一篇详细的文章可以在 这里 找到(用法语)。
(i) 目前正在积极开发中。
2. 要求
Arduino 库:
3. 针脚连接:
+-------------------------+
| MPU-6050 |
| |
| 3V3 SDA SCL GND INT |
+--+----+----+----+----+--+
| | | |
| | | |
+---------+----+----+----+----------------+
| 3.3V A4 A5 GND |
| |
| |
| Arduino Uno |
| |
| #4 #5 #6 #7 #8 #9 #10 #11 |
+--+----+----+----+----+----+----+----+---+
| | | | | | | |
(M1) (M2) (M3) (M4) | | | |
| | | |
| | | |
+--+----+----+----+---+
| C1 C2 C3 C4 |
| |
| RF 接收器 |
+---------------------+
图例:
Mx: 电机 X
Cx: 接收通道 x
4. 配置
4.1 遥控器配置
默认情况下,此草图使用模式 2 进行 RF 遥控,根据以下图片:
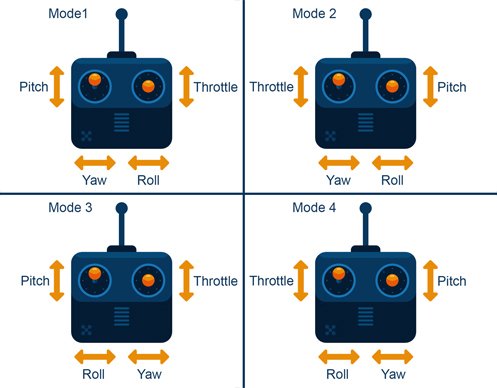
通道映射如下:
| 通道 | 命令 |
|---|---|
| 1 | 横滚 |
| 2 | 俯仰 |
| 3 | 油门 |
| 4 | 偏航 |
要更改通道映射,请根据您的需求更新函数 configureChannelMapping:
void configureChannelMapping() { mode_mapping[YAW] = CHANNEL4; mode_mapping[PITCH] = CHANNEL2; mode_mapping[ROLL] = CHANNEL1; mode_mapping[THROTTLE] = CHANNEL3; }
4.2 PID 调整
默认的 PID 系数值可能适用于 F450 类似的四轴飞行器。 但是,您可以在全局变量声明部分调整它们:
// PID 系数 float Kp[3] = {4.0, 1.3, 1.3}; // P 系数,顺序为: 偏航、俯仰、横滚 float Ki[3] = {0.02, 0.04, 0.04}; // I 系数,顺序为: 偏航、俯仰、横滚 float Kd[3] = {0, 18, 18}; // D 系数,顺序为: 偏航、俯仰、横滚
5. 四轴飞行器方位
前
(1) (2) x
\ / z ↑
X \|
/ \ +----→ y
(3) (4)
- 电机 1: 左前 - 顺时针
- �电机 2: 右前 - 逆时针
- 电机 3: 左后 - 顺时针
- 电机 4: 右后 - 逆时针
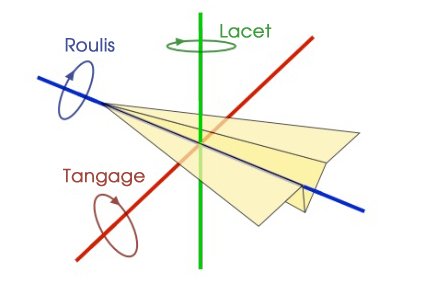
- 左翼 上 表示正侧滚
- 鼻子 上 表示正俯仰
- 鼻子 右 表示正偏航
MPU6050 必须如下方向放置:
- X 轴: 横滚
- Y 轴: 俯仰
- Z 轴: 偏航
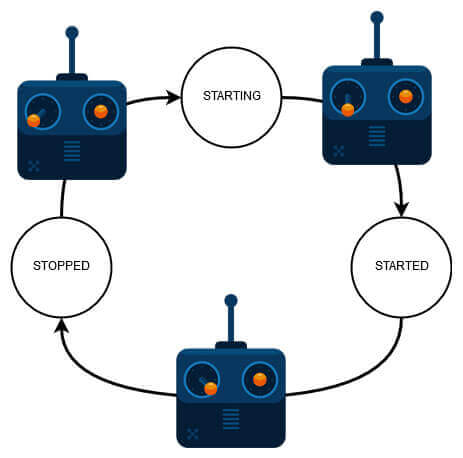
6. 启动/停止
这个草图带有一个安全过程:要启动四轴飞行器,将遥控器的左操纵杆移到左下角,然后再移回中间位置。
要停止四轴飞行器,将左操纵杆移到右下角。
7. 调试
如果您需要打印调试信息,请确保以 57600 波特初始化串行:
void setup() { Serial.begin(57600); // ... } void loop() { Serial.println(measures[ROLL]); // ... }
编辑推荐精选


扣子-AI办公
职场AI,就用扣子
AI办公助手,复杂任务高效处理。办公效率低?扣子空间AI助手支持播客生成、PPT制作、网页开发及报告写作,覆盖科研、商业、舆情等领域的专家Agent 7x24小时响应,生活工作无缝切换,提升50%效率!


堆友
多风格AI绘画神器
堆友平台由阿里巴巴设计团队创建,作为一款AI驱动的设计工具,专为设计师提供一站式增长服务。功能覆盖海量3D素材、AI绘画、实时渲染以及专业抠图,显著提升设计品质和效率。平台不仅提供工具,还是一个促进创意交流和个人发展的空间,界面友好,适合所有级别的设计师和创意工作者。


码上飞
零代码AI应用开发平台
零代码AI应用开发平台,用户只需一句话简单描述需求,AI能自动生成小程序、APP或H5网页应用,无需编写代码。


Vora
免费创建高清无水印Sora视频
Vora是一个免费创建高清无水印Sora视频的AI工具


Refly.AI
最适合小白的AI自动化工作流平台
无需编码,轻松生成可复用、可变现的AI自动化工作流


酷表ChatExcel
大模型驱动的Excel数据处理工具
基于大模型交互的表格处理系统,允许用户通过对话方式完成数据整理和可视化分析。系统采用机器学习算法解析用户指令,自动执行排序、公式计算和数据透视等操作,支持多种文件格式导入导出。数据处理响应速度保持在0.8秒以内,支持超过100万行数据的即时分析。


TRAE编程
AI辅助编程,代码自动修复
Trae是一种自适应的集成开发环境(IDE),通过自动化和多元协作改变开发流程。利用Trae,团队能够更快速、精确地编写和部署代码,从而提高编程效率和项目交付速度。Trae具备上下文感知和代码自动完成功能,是提升开发效率的理想工具。


AIWritePaper论文写作
AI论文写作指导平台
AIWritePaper论文写作是一站式AI论文写作辅助工具,简化了选题、文献检索至论文撰写的整个过程。通过简单设定,平台可快速生成高质量论文大纲和全文,配合图表、参考文献等一应俱全,同时提供开题报告和答辩PPT等增值服务,保障数据安全,有效提升写作效率和论文质量。


博思AIPPT
AI一键生成PPT,就用博思AIPPT!
博思AIPPT,新一代的AI生成PPT平台,支持智能生成PPT、AI美化PPT、文本&链接生成PPT、导入Word/PDF/Markdown文档生成PPT等,内置海量精美PPT模板,涵盖商务、教育、科技等不同风格,同时针对每个页面提�供多种版式,一键自适应切换,完美适配各种办公场景。


潮际好麦
AI赋�能电商视觉革命,一站式智能商拍平台
潮际好麦深耕服装行业,是国内AI试衣效果最好的软件。使用先进AIGC能力为电商卖家批量提供优质的、低成本的商拍图。合作品牌有Shein、Lazada、安踏、百丽等65个国内外头部品牌,以及国内10万+淘宝、天猫、京东等主流平台的品牌商家,为卖家节省将近85%的出图成本,提升约3倍出图效率,让品牌能够快速上架。
推荐工具精选




AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号