



HybridNets: 端到端感知网络
<div align="center">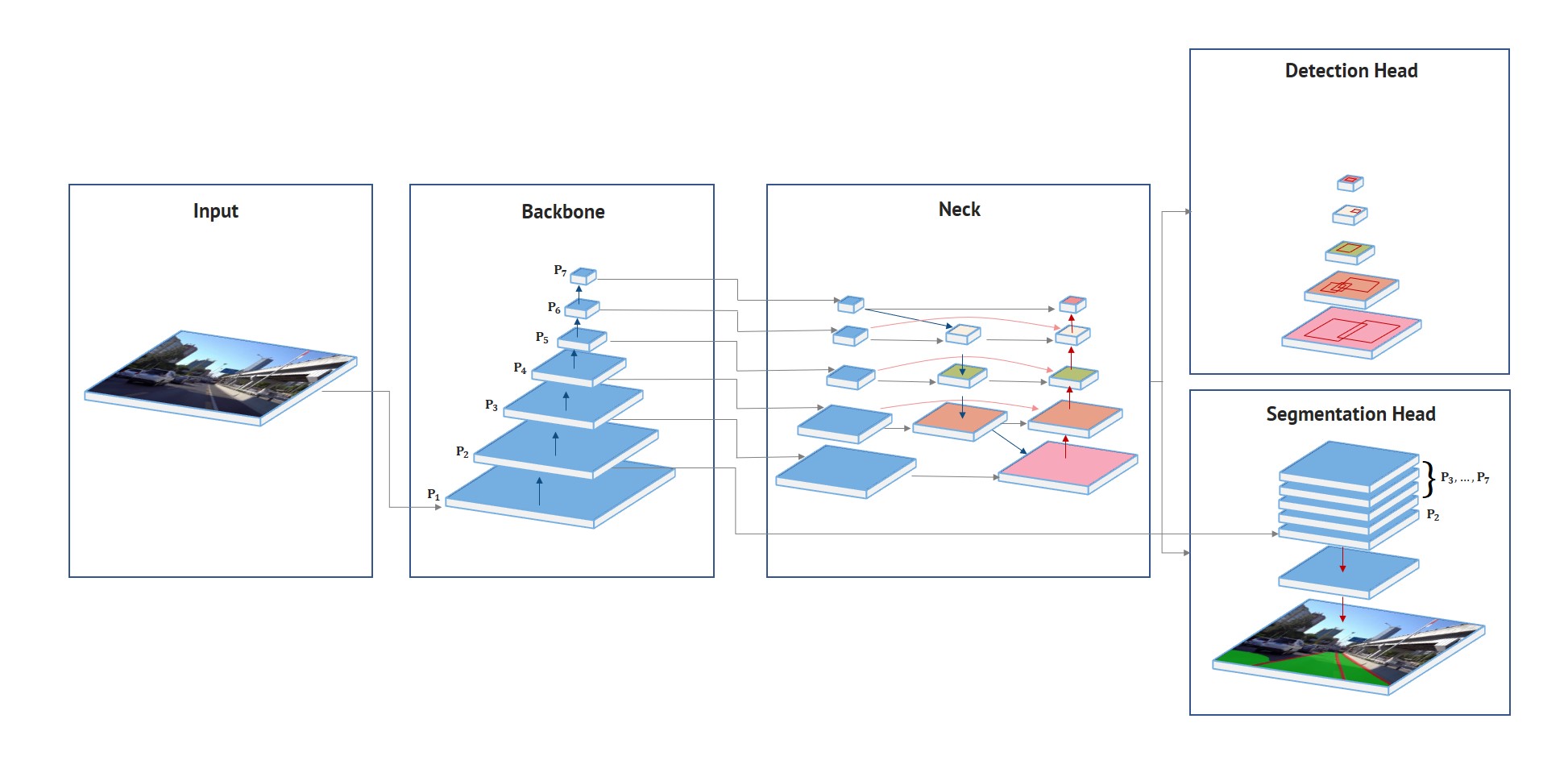 HybridNets 网络架构。
HybridNets 网络架构。
![]()
<br>
作者:Dat Vu, Bao Ngo, Hung Phan<sup> :email:</sup> FPT大学
(<sup>:email:</sup>) 通讯作者。
arXiv技术报告 (arXiv 2203.09035)
![]()
![]()
关于项目
HybridNets 是一个面向多任务的端到端感知网络。我们的工作集中在交通物体检测、可行驶区域分割和车道线检测上。HybridNets 能够在嵌入式系统上实时运行,并在 BDD100K 数据集上获得了最先进的物体检测和车道检测结果。

项目结构
HybridNets │ backbone.py # 模型配置 | export.py # 更新于2022年10月:onnx权重及附带的.npy锚点 │ hubconf.py # Pytorch Hub入口点 │ hybridnets_test.py # 图像推理 │ hybridnets_test_videos.py # 视频推理 │ train.py # 训练脚本 │ train_ddp.py # 分布式数据并行训练(多GPU) │ val.py # 验证脚本 │ val_ddp.py # 分布式数据并行验证(多GPU) │ ├───encoders # https://github.com/qubvel/segmentation_models.pytorch/tree/master/segmentation_models_pytorch/encoders │ ... │ ├───hybridnets │ autoanchor.py # 通过k-means生成新锚点 │ dataset.py # BDD100K数据集 │ loss.py # Focal损失,Tversky损失(dice) │ model.py # 模型块 │ ├───projects │ bdd100k.yml # 项目配置 │ ├───ros # C++ ROS路径规划包 │ ... │ └───utils | constants.py │ plot.py # 绘制边界框 │ smp_metrics.py # https://github.com/qubvel/segmentation_models.pytorch/blob/master/segmentation_models_pytorch/metrics/functional.py │ utils.py # 各种辅助函数(预处理,后处理,评估等)
开始使用 
安装
本项目使用 Python>=3.7 和 Pytorch>=1.10 开发。
git clone https://github.com/datvuthanh/HybridNets cd HybridNets pip install -r requirements.txt
演示
# 下载端到端权重 curl --create-dirs -L -o weights/hybridnets.pth https://github.com/datvuthanh/HybridNets/releases/download/v1.0/hybridnets.pth # 图像推理 python hybridnets_test.py -w weights/hybridnets.pth --source demo/image --output demo_result --imshow False --imwrite True # 视频推理 python hybridnets_test_videos.py -w weights/hybridnets.pth --source demo/video --output demo_result # 结果将保存在名为 demo_result 的新文件夹中
使用方法
数据准备
推荐的数据集结构:
HybridNets └───datasets ├───imgs │ ├───train │ └───val ├───det_annot │ ├───train │ └───val ├───da_seg_annot │ ├───train │ └───val └───ll_seg_annot ├───train └───val
在 projects/your_project_name.yml 中更新您的数据集路径。
对于 BDD100K:
训练
1) 编辑或创建新的项目配置,使用 bdd100k.yml 作为模板。数据增强参数在此处设置。
# 数据集的均值和标准差(RGB顺序) mean: [0.485, 0.456, 0.406] std: [0.229, 0.224, 0.225] # bdd100k 锚框 anchors_scales: '[2**0, 2**0.70, 2**1.32]' anchors_ratios: '[(0.62, 1.58), (1.0, 1.0), (1.58, 0.62)]' # BDD100K 官方支持 10 个类别 # obj_list: ['person', 'rider', 'car', 'truck', 'bus', 'train', 'motorcycle', 'bicycle', 'traffic light', 'traffic sign'] obj_list: ['car'] obj_combine: ['car', 'bus', 'truck', 'train'] # 如果是单类别,将这些类别合并为 obj_list 中的一个类别 # 留空列表 ([]) 则不合并类别 seg_list: ['road', 'lane'] seg_multilabel: false # 一个像素可以属于多个标签(如车道线 + 底层道路) dataset: dataroot: path/to/imgs labelroot: path/to/det_annot segroot: # 必须与 seg_list 顺序一致 - path/to/da_seg_annot - path/to/ll_seg_annot fliplr: 0.5 flipud: 0.0 hsv_h: 0.015 hsv_s: 0.7 hsv_v: 0.4 ...
2) 训练
python train.py -p bdd100k # 您的项目名称 -c 3 # effnet 骨干网络的系数,论文中的结果是 3 或 -bb repvgg_b0 # 使用 timm 更改骨干网络 -n 4 # num_workers -b 8 # 每个 GPU 的批量大小 -w path/to/weight # 使用 'last' 从之前的会话恢复训练 --freeze_det # 冻结检测头,其他选项:--freeze_backbone, --freeze_seg --lr 1e-5 # 学习率 --optim adamw # adamw | sgd --num_epochs 200
请查看 python train.py --help 获取更多选项。
重要 (已废弃): 如果您想在多个 GPU 上训练,请使用 train_ddp.py。已在 NVIDIA DGX 上使用 8xA100 40GB 测试。
为什么我们没有将 DDP 合并到现有的 train.py 脚本中?
- 有太多的 if-else 语句。
- 不想破坏已经正常运行的功能。
- 懒。
2022年6月24日更新: 由于我们做了很多更改,train_ddp.py 已经失效。因此,我们决定编写一个支持 DDP 的合并版 train.py,以便于维护。同时,如果您确实需要使用,请克隆这个提交,其中包含一个可用的 train_ddp.py 脚本。
3) 评估
python val.py -w checkpoints/weight.pth
同样,查看 python val.py --help 获取更多选项。
验证过程被终止了!我该怎么办? => 这是因为我们使用了 0.001 的默认置信度阈值来与其他网络进行比较。因此,在计算指标时,需要处理大量的边界框,导致内存不足,最终在下一个 epoch 开始前使程序崩溃。
话虽如此,有多种方法可以解决这个问题,请选择最适合您的方法:
- 在高内存实例上训练(这里的内存指主内存,而非GPU的显存)。供您参考,我们只能在64GB内存的机器上验证合并后的"汽车"类别。
- 使用
python train.py --cal_map False进行训练,以在验证时不计算指标。这个选项只会打印验证损失。当损失趋于平稳且条件允许时,可以租用一台高内存实例,使用python val.py -w checkpoints/xxx_best.pth来验证最佳权重。我们实际上就是这样做来节省成本的。 - 根据您的应用和最终目标,使用
python train.py --conf_thres 0.5或python val.py --conf_thres 0.5来降低置信度阈值。除非您是在帮助我们进行实验:smiling_face_with_three_hearts:或与我们竞争:angry:,否则不必追求最佳召回率。
4) 导出
python export.py -w checkpoints/weight.pth --width 640 --height 384
这会自动创建一个ONNX权重文件和一个anchor_{H}_{W}.npy文件,用于后处理。使用示例请参考ROS部分。
训练技巧
锚框 :anchor:
如果您的数据集本质上与COCO或BDD100K不同,或者训练后的检测指标不如预期,您可以尝试在project.yml中启用自动锚框:
... model: image_size: - 640 - 384 need_autoanchor: true # 设置为true以运行自动锚框 pin_memory: false ...
这会自动为您的数据集找到最佳的锚框比例和锚框比率组合。然后您可以手动编辑project.yml并禁用自动锚框。
如果您想碰碰运气,可以尝试修改backbone.py中的base_anchor_scale:
class HybridNetsBackbone(nn.Module): ... self.pyramid_levels = [5, 5, 5, 5, 5, 5, 5, 5, 6] self.anchor_scale = [1.25,1.25,1.25,1.25,1.25,1.25,1.25,1.25,1.25,] self.aspect_ratios = kwargs.get('ratios', [(1.0, 1.0), (1.4, 0.7), (0.7, 1.4)]) ...
以及model.py:
class Anchors(nn.Module): ... for scale, ratio in itertools.product(self.scales, self.ratios): base_anchor_size = self.anchor_scale * stride * scale anchor_size_x_2 = base_anchor_size * ratio[0] / 2.0 anchor_size_y_2 = base_anchor_size * ratio[1] / 2.0 ...
以了解锚框的工作原理。
一图胜千言,您可以使用锚框计算工具来可视化您的锚框。
训练阶段
我们尝试了不同的训练阶段,发现以下设置效果最佳:
--freeze_seg True~ 200轮--freeze_backbone True --freeze_det True~ 50轮- 端到端训练 ~ 50轮
原因是检测头在早期较难收敛,所以我们基本上跳过了分割头,先专注于检测。
结果
交通物体检测
<table> <tr><th>结果 </th><th>可视化</th></tr> <tr><td>| 模型 | 召回率 (%) | mAP@0.5 (%) |
|---|---|---|
MultiNet | 81.3 | 60.2 |
DLT-Net | 89.4 | 68.4 |
Faster R-CNN | 77.2 | 55.6 |
YOLOv5s | 86.8 | 77.2 |
YOLOP | 89.2 | 76.5 |
HybridNets | 92.8 | 77.3 |
<img src="https://yellow-cdn.veclightyear.com/0a4dffa0/c162af23-da56-4a4a-a74f-ff0f546cba2e.jpg" width="50%" /><img src="https://yellow-cdn.veclightyear.com/0a4dffa0/015e2643-b1b9-4f93-84b0-715a316b2be4.jpg" width="50%" />
</td></tr> </table>可行驶区域分割
<table> <tr><th>结果 </th><th>可视化</th></tr> <tr><td>| 模型 | 可行驶区域 mIoU (%) |
|---|---|
MultiNet | 71.6 |
DLT-Net | 71.3 |
PSPNet | 89.6 |
YOLOP | 91.5 |
HybridNets | 90.5 |
车道线检测
<table> <tr><th>结果 </th><th>可视化</th></tr> <tr><td>| 模型 | 准确率 (%) | 车道线IoU (%) |
|---|---|---|
Enet | 34.12 | 14.64 |
SCNN | 35.79 | 15.84 |
Enet-SAD | 36.56 | 16.02 |
YOLOP | 70.5 | 26.2 |
HybridNets | 85.4 | 31.6 |
<img src="https://yellow-cdn.veclightyear.com/0a4dffa0/0302d69d-84cc-4b78-ab4b-68f39cf5711e.jpg" width="50%" /><img src="https://yellow-cdn.veclightyear.com/0a4dffa0/bcb9e161-8f7c-407f-b093-93350dac83db.jpg" width="50%" />
</td></tr> </table> <div align="center">
原始视�频 由 Hanoi Life 提供
</div>许可证
根据MIT许可证分发。更多信息请参见LICENSE。
致谢
没有以下作者的出色工作,我们的工作将无法完成:
引用
如果您认为我们的论文和代码对您的研究有用,请考虑给予星星 :star: 和引用 :pencil: :
@misc{vu2022hybridnets, title={HybridNets: End-to-End Perception Network}, author={Dat Vu and Bao Ngo and Hung Phan}, year={2022}, eprint={2203.09035}, archivePrefix={arXiv}, primaryClass={cs.CV} }
编辑推荐精选


扣子-AI办公
职场AI,就用扣子
AI办公助手,复杂任务高效处理。办公效率低?扣子空间AI助手支持播客生成、PPT制作、网页开发及报告写作,覆盖科研、商业、舆情等领域的专家Agent 7x24小时响应,生活工作无缝切换,提升50%效率!


堆友
多风格AI绘画神器
堆友平台由阿里巴巴设计团队创建,作为一款AI驱动的设计工具,专为设计师提供一站式增长服务。功能覆盖海量3D素材、AI绘画、实时渲染以及专业抠图,显著提升设计品质和效率。平台不仅提供工具,还是一个促进创意交流和个人发展的空间,界面友好,适合所有级别的设计师和创意工作者。


码上飞
零代码AI应用开发平台
零代码AI应用开发平台,用户只需一句话简单描述需求,AI能自动生成小程序、APP或H5网页应用,无需编写代码。


Vora
免费创建高清无水印Sora视频
Vora是一个免费创建高清无水印Sora视频的AI工具


Refly.AI
最适合小白的AI自动化工作流平台
无需编码,轻松生成可�复用、可变现的AI自动化工作流


酷表ChatExcel
大模型驱动的Excel数据处理工具
基于大模型交互的表格处理系统,允许用户通过对话方式完成数据整理和可视化分析。系统采用机器学习算法解析用户指令,自动执行排序、公式计算和数据透视等操作,支持多种文件格式导入导出。数据处理响应速度保持在0.8秒以内,支持超过100万行数据的即时分析。


TRAE编程
AI辅助编程,代码自动修复
Trae是一种自适应的集成开发环境(IDE),通过自动化和多元协作改变开发流程。利用Trae,团队能够更快速、精确地编写和部署代码,从而提高编程效率和项目交付速度。Trae具备上下文感知和代码自动完成功能,是提升开发效率的理想工具。


AIWritePaper论文写作
AI论文写作指导平台
AIWritePaper论文写作是一站式AI论文写作辅助工具,简化了选题、文献检索至论文撰写的整个过程。通过简单设定,平台可快速生成高质量论文大纲和全文,配合图表、参考文献等一应俱全,同时提供开题报告和答辩PPT等增值服务,保障数据安全,有效提升写作效率和论文质量。


博思AIPPT
AI一键生成PPT,就用博思AIPPT!
博思AIPPT,新一代的AI生成PPT平台,支�持智能生成PPT、AI美化PPT、文本&链接生成PPT、导入Word/PDF/Markdown文档生成PPT等,内置海量精美PPT模板,涵盖商务、教育、科技等不同风格,同时针对每个页面提供多种版式,一键自适应切换,完美适配各种办公场景。


潮际好麦
AI赋能电商视觉革命,一站式智能商拍平台
潮际好麦深耕服装行业,是国内AI试衣效果最好的软件。使用先进AIGC能力为电商卖家批量提供优质的、低成本的商拍图。合作品牌有Shein、Lazada、安踏、百丽等65个国内外头部品牌,以及国内10万+淘宝、天猫、京东等主流平台的品牌商家,为卖家节省将近85%的出图成本,提升约3倍出图效率,让品牌能够快速上架。
推荐工具精选




AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号