端到端自动驾驶技术:挑战与前沿
 Ray
Ray端到端自动驾驶技术概述
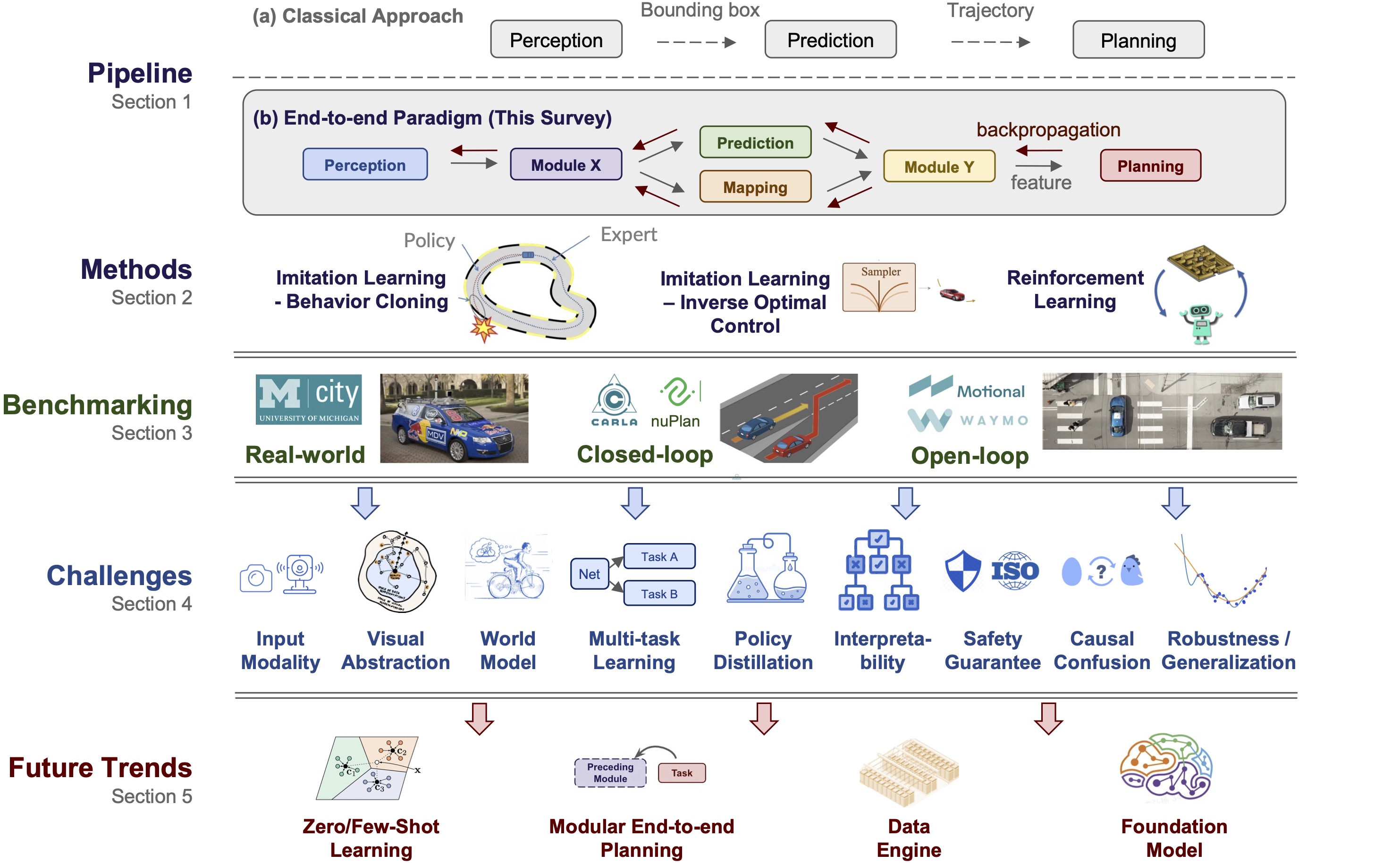
端到端自动驾驶是一种新兴的自动驾驶方法,直接从原始传感器输入生成车辆控制指令,而不是将任务分解为检测、预测等多个子任务。近年来,随着深度学习技术的进步,端到端自动驾驶方法受到了越来越多的关注。本文将全面介绍端到端自动驾驶技术的最新进展、主要挑战以及未来发展方向。
发展背景
传统的自动驾驶系统通常采用模块化设计,将任务分解为感知、预测、规划等多个模块。虽然这种方法具有可解释性强、易于调试等优点,但各模块之间的错误累积也可能导致系统性能下降。端到端方法试图通过端到端训练来克服这一问题,直接从原始传感器数据学习驾驶策略。
近年来,得益于深度学习和强化学习技术的进步,端到端自动驾驶取得了显著进展。许多研究表明,端到端方法在某些场景下可以达到甚至超越传统模块化方法的性能。然而,端到端自动驾驶仍面临诸多挑战,需要研究人员继续努力。
主要优势
端到端自动驾驶相比传统方法具有以下几个潜在优势:
- 避免中间表示的信息损失,可以充分利用原始数据中的信息。
- 端到端优化可以学习到更优的特征表示和决策策略。
- 系统结构更加简洁,减少了人工设计的复杂度。
- 具有更好的泛化性,可以适应复杂多变的驾驶场景。
- 训练和部署更加高效,减少了中间模块的计算开销。
然而,端到端方法也存在一些局限性,如可解释性差、数据需求大、难以融入先验知识等。因此,如何扬长避短、发挥端到端方法的优势是一个重要的研究方向。
关键挑战与前沿技术
尽管端��到端自动驾驶技术发展迅速,但仍面临诸多挑战。以下介绍几个关键挑战及相关的前沿技术:
多模态感知融合
自动驾驶需要融合摄像头、激光雷达、毫米波雷达等多种传感器的信息。如何有效地融合异构传感器数据是一个重要挑战。目前主流的方法包括:
- 早期融合:在特征提取前就融合原始数据
- 中期融合:融合中间层特征
- 晚期融合:融合各模态的高层特征或决策结果
此外,一些工作尝试使用注意力机制或图神经网络来建模不同模态间的关系。如何设计更高效的多模态融合架构仍是一个活跃的研究方向。
可解释性与安全性
端到端方法的一个主要问题是可解释性差,难以理解系统的决策依据。这对自动驾驶的安全性和可信度带来了挑战。目前的研究主要从以下几个方面提高端到端系统的可解释性:
- 注意力可视化:通过可视化模型的注意力分布,展示决策的关注点。
- 语言解释:生成自然语言解释来描述系统的决策过程。
- 因果推理:建立驾驶场景的因果模型,分析决策的因果关系。
- 中间表示学习:学习具有语义意义的中间表示,如affordance等。
提高端到端系统的可解释性和安全性仍是一个重要的研究方向。
鲁棒性与泛化性
端到端系统需要具备强大的鲁棒性和泛化性,以应对复杂多变的驾驶环境。主要的挑战包括:
- 长尾分布问题:如何处理稀有场景和边缘案例。
- 分布偏移:模型在新环境下的泛化能力。
- 对抗样本:对抗性干扰下的鲁棒性。
一些promising的方法包括:
- 数据增强:通过模拟、合成等方法生成更多样化的训练数据。
- 领域自适应:使用领域适应技术提高模型在新场景的泛化性。
- 不确定��性建模:对模型预测的不确定性进行建模和量化。
- 因果学习:学习更加稳定和泛化的因果特征。
提高端到端系统的鲁棒性和泛化性仍需要更多的研究工作。
大规模学习与知识迁移
端到端方法通常需要大量的训练数据。如何高效地从海量数据中学习,以及如何将知识迁移到新任务,是端到端自动驾驶面临的重要挑战。一些promising的方向包括:
- 预训练模型:利用大规模数据预训练通用的驾驶表示。
- 多任务学习:同时学习多个相关任务,提高数据利用效率。
- 元学习:学习快速适应新任务的能力。
- 知识蒸馏:将大模型的知识迁移到小模型。
- 联邦学习:在保护隐私的前提下进行大规模分布式学习。
如何更好地利用大规模数据和知识,是提升端到端自动驾驶性能的关键。
未来发展趋势
展望未来,端到端自动驾驶技术可能朝以下几个方向发展:
- 与传统方法的结合:融合端到端方法与传统模块化方法的优势。
- 大模型与预训练:利用大规模预训练模型提升性能。
- 多智能体协同:研究车-车、车-路协同的端到端方法。
- 世界模型:构建可推理、可规划的驾驶环境世界模型。
- 可解释AI:开发更加可解释、可信赖的端到端系统。
- 仿真与现实结合:利用仿真环境辅助训练和测试。
- 硬件协同设计:端到端算法与专用硬件的协同优化。
端到端自动驾驶是一个充满挑战和机遇的研究领域。通过学术界和工业界的共同努力,相信端到端技术将为实现更安全、更智能的自动驾驶系统做出重要贡献。
结语
端到端自动驾驶技术作为一种新兴的范式,展现出了巨大的潜力。尽管仍面临诸多挑战,但随着深度学习、强化学习等技术的不�断进步,端到端方法有望在未来的自动驾驶系统中发挥越来越重要的作用。本文全面介绍了端到端自动驾驶的发展现状、关键挑战及未来趋势,希望能为相关研究人员和开发者提供有价值的参考。
如果您对端到端自动驾驶感兴趣,欢迎访问 OpenDriveLab 项目,该项目提供了丰富的学习资源、论文列表、数据集和基准测试。让我们共同努力,推动自动驾驶技术的发展,为未来的智能交通做出贡献!
编辑推荐精选


音述AI
全球首个AI音乐社区
音述AI是全球首个AI音乐社区,致力让每个人都能用音乐表达自我。音述AI提供零门槛AI创作工具,独创GETI法则帮助用户精准定义音乐风格,AI润色功能支持自动优化作品质感。音述AI支持交流讨论、二次创作与价值变现。针对中文用户的语言习惯与文化背景进行专门优化,支持国风融合、C-pop等本土音乐标签,让技术更好地承载人文表达。


QoderWork
阿里Qoder团队推出的桌面端AI智能体
QoderWork 是阿里推出的本地优先桌面 AI 智能体,适配 macOS14+/Windows10+,以自然语言交互实现文件管理、数据分析、AI 视觉生成、浏览器自动化等办公任务,自主拆解执行复杂工作流,数据本地运行零上传,技能市场可无�限扩展,是高效的 Agentic 生产力办公助手。


lynote.ai
一站式搞定所有学习需求
不再被海量信息淹没,开始真正理解知识。Lynote 可摘要 YouTube 视频、PDF、文章等内容。即时创建笔记,检测 AI 内容并下载资料,将您的学习效率提升 10 倍。


AniShort
为AI短剧协作而生
专为AI短剧协作而生的AniShort正式发布,深度重构AI短剧全流程生产模式,整合创意策划、制作执行、实时协作、在线审片、资产复用等全链路功能,独创无限画布、双轨并行工业化工作流与Ani智能体助手,集成多款主流AI大模型,破解素材零散、版本混乱、沟通低效等行业痛点,助力3人团队效率提升800%,打造标准化、可追溯的AI短剧量产体系,是AI短剧团队协同创作、提升制作效率的核心工具。


seedancetwo2.0
能听懂你表达的视频模型
Seedance two是基于seedance2.0的中国大模型,支持图像、视频、音频、文本四种模态输入,表达方式更丰富,生成也更可控。


nano-banana纳米香蕉中文站
国内直接访问,限时3折
输入简单文字,生成想要的图片,纳米香蕉中文站基于 Google 模型的 AI 图片生成网站,支持文字生图、图生图。官网价格限时3折活动


扣子-AI办公
职场AI,就用扣子
AI办公助手,复杂任务高效处理。办公效率低?扣子空间AI助手支持播客生成、PPT制作、网页开发及报告写作,覆盖科研、商业、舆情等领域的专家Agent 7x24小时响应,生活工作无缝切换,提升50%效率!


堆友
多风格AI绘画神器
堆友平台由阿里巴巴设计团队创建,作为一款AI驱动的设计工具,专为设计师提供一站式增长服务。功能覆盖海量3D素材、AI绘画、实时渲染以及专业抠图,显著提升设计品质和效率。平台不仅提供工具,还是一个促进创意交流和个人发展的空间,界面友好,适合所有级别的设计师和创意工作者。


码上飞
零代码AI应用开发平台
零代码AI应用开发平台,用户只需一句话简单描述需求,AI能自动生成小程序、APP或H5网页应用,无需编写代码。


Vora
免费创建高清无水印Sora视频
Vora是一个免费创建高清无水印Sora视频的AI工具
推荐工具精选





AI云服务特惠
懂AI专属折扣关注微信公众号
最新AI工具、AI资讯
独家AI资源、AI项目落地

微信扫一扫关注公众号